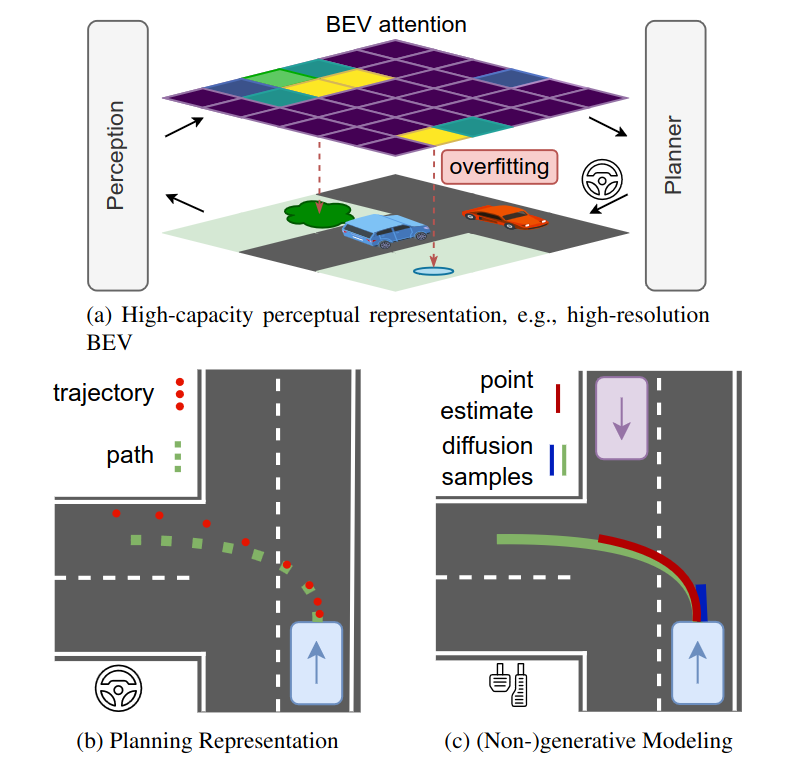
@inproceedings{holtz2026bevad,title={What Matters for Scalable and Robust Learning in End-to-End Driving Planners?},author={Holtz, David and Hanselmann, Niklas and Doll, Simon and Cordts, Marius and Schiele, Bernt},booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},pages={931--941},year={2026},}
2025
EMPERROR: A Flexible Generative Perception Error Model for Probing Self-Driving Planners
Niklas Hanselmann, Simon Doll, Marius Cordts, and 2 more authors
@article{hanselmann2025emperror,title={EMPERROR: A Flexible Generative Perception Error Model for Probing Self-Driving Planners},author={Hanselmann, Niklas and Doll, Simon and Cordts, Marius and Lensch, Hendrik PA and Geiger, Andreas},journal={IEEE Robotics and Automation Letters},year={2025},publisher={IEEE},}
2024
Dualad: Disentangling the dynamic and static world for end-to-end driving
Simon Doll, Niklas Hanselmann, Lukas Schneider, and 4 more authors
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024
@inproceedings{doll2024dualad,title={Dualad: Disentangling the dynamic and static world for end-to-end driving},author={Doll, Simon and Hanselmann, Niklas and Schneider, Lukas and Schulz, Richard and Cordts, Marius and Enzweiler, Markus and Lensch, Hendrik},booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},pages={14728--14737},year={2024},}
2023
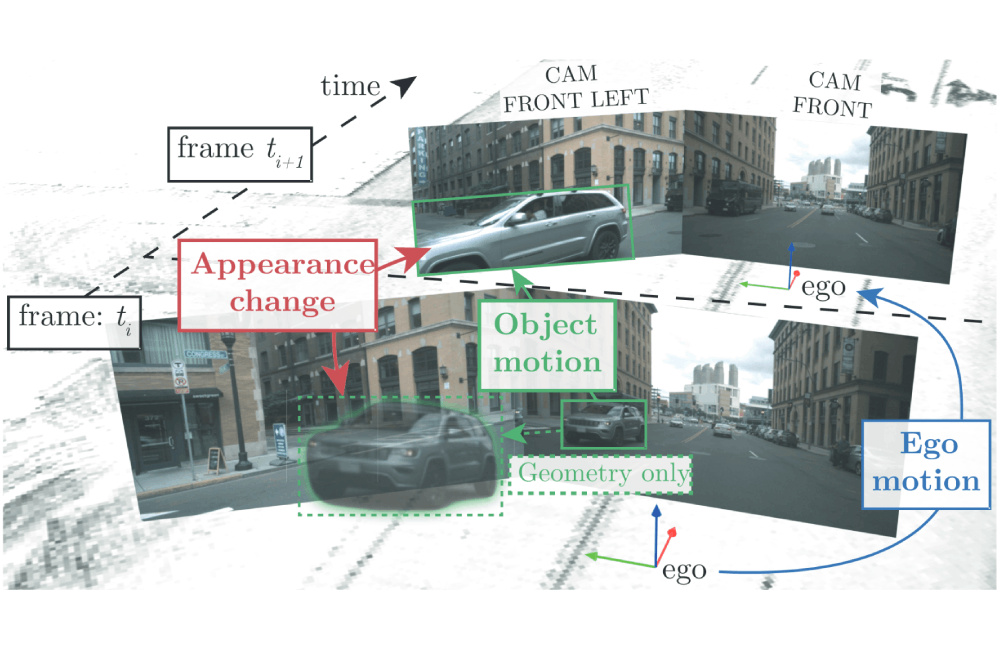
Star-track: Latent motion models for end-to-end 3d object tracking with adaptive spatio-temporal appearance representations
Simon Doll, Niklas Hanselmann, Lukas Schneider, and 3 more authors
@article{doll2022startrack,title={Star-track: Latent motion models for end-to-end 3d object tracking with adaptive spatio-temporal appearance representations},author={Doll, Simon and Hanselmann, Niklas and Schneider, Lukas and Schulz, Richard and Enzweiler, Markus and Lensch, Hendrik PA},journal={IEEE Robotics and Automation Letters},volume={9},number={2},pages={1326--1333},year={2023},publisher={IEEE},}
2022
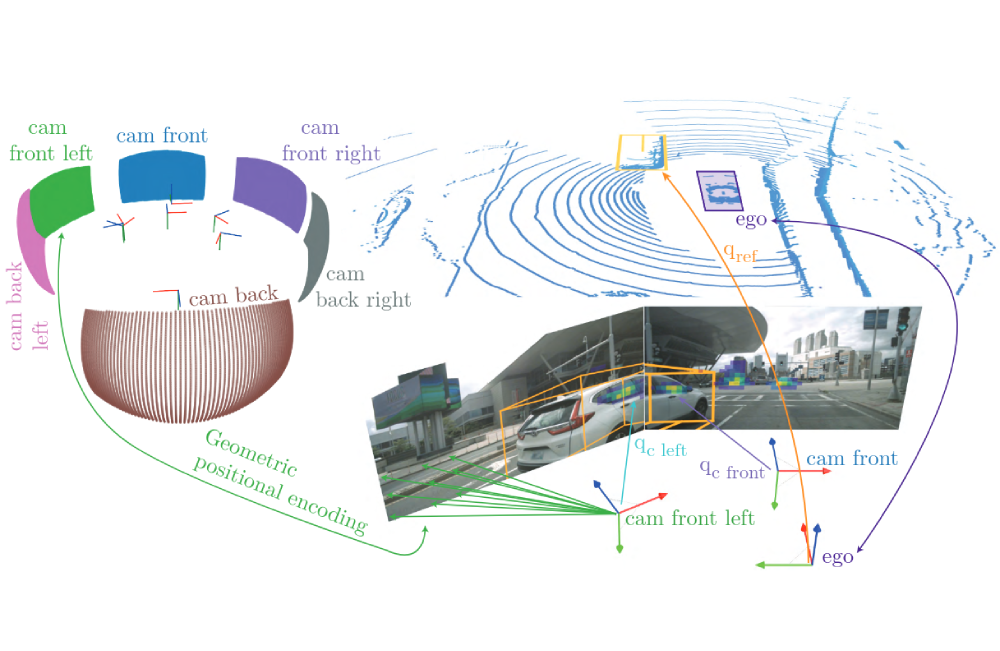
SpatialDETR: Robust Scalable Transformer-Based 3D Object Detection From Multi-view Camera Images With Global Cross-Sensor Attention
Simon Doll, Richard Schulz, Lukas Schneider, and 3 more authors
In Computer Vision–ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part XXXIX, 2022
@inproceedings{doll2022spatialdetr,title={SpatialDETR: Robust Scalable Transformer-Based 3D Object Detection From Multi-view Camera Images With Global Cross-Sensor Attention},author={Doll, Simon and Schulz, Richard and Schneider, Lukas and Benzin, Viviane and Enzweiler, Markus and Lensch, Hendrik PA},booktitle={Computer Vision--ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23--27, 2022, Proceedings, Part XXXIX},pages={230--245},year={2022},organization={Springer},}